|
Страница 1 из 2 Роботы — это физические агенты, которые выполняют поставленные перед ними задачи, проводя манипуляции в физическом мире. Для этой цели роботов оснащают исполнительными механизмами, такими как ноги, колеса, шарниры и захваты. Исполнительные механизмы имеют единственное назначение — прилагать физические усилия к среде. Кроме того, роботов оснащают датчиками, которые позволяют им воспринимать данные об окружающей их среде. В современных роботах применяются различные виды датчиков, включая те, что предназначены для измерения характеристик среды (например, видеокамеры и ультразвуковые дальномеры), и те, которые измеряют характеристики движения самого робота (например, гироскопы и акселерометры). Большинство современных роботов относится к одной из трех основных категорий. Роботы-манипуляторы, или роботы-руки, физически привязаны к своему рабочему месту, например на заводском сборочном конвейере или на борту Международной космической станции. В движении манипулятора обычно участвует вся цепочка управляемых шарниров, что позволяет таким роботам устанавливать свои исполнительные механизмы в любую позицию в пределах своего рабочего пространства. Манипуляторы относятся к типу наиболее распространенных промышленных роботов, поскольку во всем мире установлено свыше миллиона таких устройств. Некоторые мобильные манипуляторы используются в больницах в качестве ассистентов хирургов. Без робототехнических манипуляторов в наши дни не смогут продолжать свою производственную деятельность большинство автомобильных заводов, а некоторые манипуляторы использовались даже для создания оригинальных художественных произведений. Ко второй категории относятся мобильные роботы. Роботы такого типа передвигаются в пределах своей среды с использованием колес, ног или аналогичных механизмов. Они нашли свое применение при доставке обедов в больницах, при перемещении контейнеров в грузовых доках, а также при выполнении аналогичных задач. В этой книге уже встречался один пример мобильного робота — автоматическое наземное транспортное средство (Unmanned Land Vehicle — ULV) NavLab, способное автономно передвигаться по автомагистралям в режиме самовождения. К другим типам мобильных роботов относятся автоматическое воздушное транспортное средство (Unmanned Air Vehicle — UAV), обычно используемое для воздушного наблюдения, химической обработки земельных участков и военных операций, автономное подводное транспортное средство (Autonomous Underwater Vehicle — AUV), используемое в глубоководных морских исследованиях, и планетоход, такой как робот Sojourner, показанный на рис. 25.1, а. 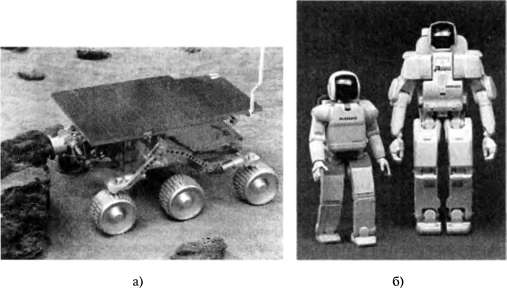 Рис. 25.1. Фотографии широко известных роботов: движущийся робот Sojourner агентства NASA, который исследовал поверхность Марса в июле 1997 года (а); роботы-гуманоиды РЗ и Asimo компании Honda (б)
<< В начало < Предыдущая 1 2 Следующая > В конец >>
|