|
Планирование с помощью поиска в пространстве состояний |
|
Данный раздел посвящен описанию алгоритмов планирования. Наиболее простой подход состоит в использовании поиска в пространстве состояний. Поскольку описания действий в задаче планирования определяют и предусловия, и результаты, существует возможность организовать поиск в обоих направлениях: либо в прямом, от начального состояния, либо в обратном, от цели, как показано на рис. 11.1. Кроме того, явные представления действий и целей могут использоваться для автоматического вывода эффективных эвристик. 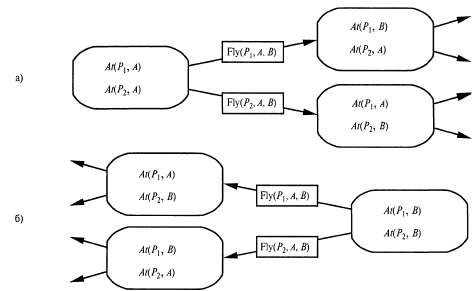 Рис. 11.1. Два подхода к организации поиска плана: прямой (прогрессивный) поиск в пространстве состояний, начинающийся с начального состояния, в котором используются действия задачи для прямого поиска целевого состояния (а); обратный (регрессивный) поиск в пространстве состояний: поиск доверительного состояния (см. с. 141), начинающийся с целевого состояния (состояний), в котором для обратного поиска начального состояния используются инверсии действий (б)
|