|
Страница 2 из 2 Поскольку края соответствуют тем участкам изображения, где яркость подвергается резким изменениям, то на первый взгляд может показаться, что достаточно дифференцировать изображение и найти такие места, где производная т1 (х) принимает большое значение. И действительно, такой подход в определенной степени осуществим. Тем не менее, как показано на рис. 24.6, б, кроме основного пикового значения с координатой х=50, обнаруживаются также дополнительные пиковые значения в других местах (например, с координатой х=7 5), которые могут быть ошибочно приняты за настоящие края. Эти дополнительные пиковые значения возникают из-за наличия шума в изображении. Если вначале будет проведено сглаживание изображения, то количество фиктивных пиков уменьшится, как показано на рис. 24.6, в. Теперь у нас появляется возможность применить на данном этапе определенную оптимизацию, поскольку операции сглаживания и поиска краев можно объединить в одну операцию. Существует теорема, согласно которой для любых функций f u g производная свертки, (f*g) ', равна свертке с производной, f*(g) '. Поэтому вместо сглаживания изображения с последующим дифференцированием можно просто выполнить свертку изображения с производной гауссовой функцией сглаживания,  . Таким образом, алгоритм поиска края в одном измерении может быть представлен следующим образом. . Таким образом, алгоритм поиска края в одном измерении может быть представлен следующим образом. 1. Выполнить свертку изображения I с функцией для получения результатов свертки R. для получения результатов свертки R. 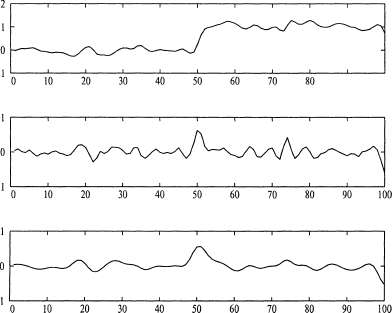
Рис. 24.6. Верхний рисунок: профиль интенсивности I (х) вдоль одномерного разреза, пересекающего край, который характеризуется ступенчатым изменением яркости. Средний рисунок: производная интенсивности, I ' (х). Большие значения на этом графике соответствуют краям, но представленные на нем данные содержат шум. Нижний рисунок: производная от сглаженной версии данных об интенсивности,  , которая может быть вычислена в одном шаге как свертка , которая может быть вычислена в одном шаге как свертка . Исчез появившийся под воздействием шума пик с координатой x=75, который в других условиях рассматривался бы как признак наличия края . Исчез появившийся под воздействием шума пик с координатой x=75, который в других условиях рассматривался бы как признак наличия края 2. Обозначить как края те пиковые значения в | | R (χ) | |, которые превышают некоторое заранее заданное пороговое значение т. Это пороговое значение выбирается таким образом, чтобы можно было устранить фиктивные пиковые значения, возникшие под воздействием шума. В двух измерениях края могут проходить под любым углом Θ. Для обнаружения вертикальных краев можно применить такую очевидную стратегию: выполнить свертку с  . В направлении у эффект этой операции сведется к тому, что будет выполнено только сглаживание (под воздействием гауссовой свертки), а в направлении χ результатом операции станет то, что дифференцирование будет сопровождаться сглаживанием. Поэтому алгоритм обнаружения вертикальных краев состоит в следующем. . В направлении у эффект этой операции сведется к тому, что будет выполнено только сглаживание (под воздействием гауссовой свертки), а в направлении χ результатом операции станет то, что дифференцирование будет сопровождаться сглаживанием. Поэтому алгоритм обнаружения вертикальных краев состоит в следующем. 1. Выполнить свертку изображения I(х,у) с функцией доя получения результатов свертки доя получения результатов свертки 2. Обозначить как края те пиковые значения в , которые превышают некоторое заранее заданное пороговое значение т. , которые превышают некоторое заранее заданное пороговое значение т. Для того чтобы обнаружить какой-либо край, имеющий произвольную ориентацию, необходимо выполнить свертку изображения с двумя фильтрами,  , где функция , где функция соответствует функции соответствует функции , график которой повернут на 90°. Таким образом, алгоритм обнаружения краев, имеющих произвольную ориентацию, состоит в следующем. , график которой повернут на 90°. Таким образом, алгоритм обнаружения краев, имеющих произвольную ориентацию, состоит в следующем. 1. Выполнить свертку изображения I(х,у) с функциями доя получения соответственно результатов свертки доя получения соответственно результатов свертки . Определить . Определить 2. Обозначить как края те пиковые значения в , которые превышают некоторое заранее заданное пороговое значение т. , которые превышают некоторое заранее заданное пороговое значение т. После того как с помощью этого алгоритма будут отмечены пикселы краев, на следующем этапе необходимо связать друг с другом те пикселы, которые принадлежат к одним и тем же кривым краев. Такую операцию можно выполнить, приняв предположение, что любые два соседних пиксела, которые являются пикселами края с совместимыми ориентациями, должны принадлежать к одной и той же кривой края. Описанный выше процесс получил название процесса обнаружения края Кэнни в честь его разработчика Джона Кэнни (John Canny). Края после их обнаружения становятся основой для многих этапов последующей обработки: их можно использовать для выполнения стереооптической обработки, обнаружения движения или распознавания объектов.
<< В начало < Предыдущая 1 2 Следующая > В конец >>
|