|
Страница 1 из 3 Исполнительные механизмы являются теми средствами, с помощью которых роботы передвигаются и изменяют форму своего тела. Для того чтобы понять основные особенности конструкции исполнительных механизмов, необходимо вначале рассмотреть абстрактные понятия движения и формы, используя концепцию степени свободы. Как степень свободы мы будем рассматривать каждое независимое направление, в котором могут передвигаться либо робот, либо один из его исполнительных механизмов. Например, твердотельный свободно движущийся робот, такой как автономный подводный аппарат, имеет шесть степеней свободы; три из них, (х,у, ζ), определяют положение робота в пространстве, а три других — его угловую ориентацию по трем осям вращения, известную как качание (yaw), поворот (roll) и наклон (pitch). Эти шесть степеней свободы определяют кинематическое состояние или позу робота. Динамическое состояние робота включает по одному дополнительному измерению для скорости изменения каждого кинематического измерения. Роботы, не являющиеся твердотельными, имеют дополнительные степени свободы внутри самих себя. Например, в руке человека локоть имеет одну степень свободы (может сгибаться в одном направлении), а кисть имеет три степени свободы (может двигаться вверх и вниз, из стороны в сторону, а также вращаться). Каждый из шарниров робота также имеет 1, 2 или 3 степени свободы. Для перемещения любого объекта, такого как рука, в конкретную точку с конкретной ориентацией необходимо иметь шесть степеней свободы. Рука, показанная на рис. 25.3, я, имеет точно шесть степеней свободы, создаваемых с помощью пяти поворотных шарниров, которые формируют вращательное движение, и одного призматического сочленения, который формирует скользящее движение. Чтобы убедиться в том, что рука человека в целом имеет больше шести степеней свободы, можно провести простой эксперимент: положите кисть на стол и убедитесь в том, что вы еще имеете возможность поворачивать руку в локте, не меняя положения кисти на столе. Манипуляторами, имеющими больше степеней свободы, чем требуется для перевода конечного исполнительного механизма в целевое положение, проще управлять по сравнению с роботами, имеющими лишь минимальное количество степеней свободы. 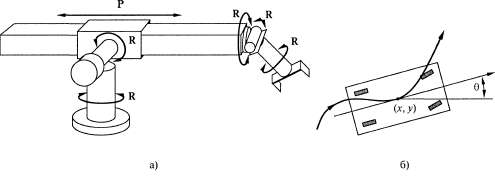 Рис. 25.3. Особенности конструкции манипулятора робота: станфордский манипулятор (Stanford Manipulator) — один из первых манипуляторов робота, в котором используются пять поворотных шарниров (R) и одно призматическое сочленение (V), что позволяет получить в целом шесть степеней свободы (а); траектория движения неголономного четырехколесного транспортного средства с рулевым управлением от передних колес (б)
<< В начало < Предыдущая 1 2 3 Следующая > В конец >>
|